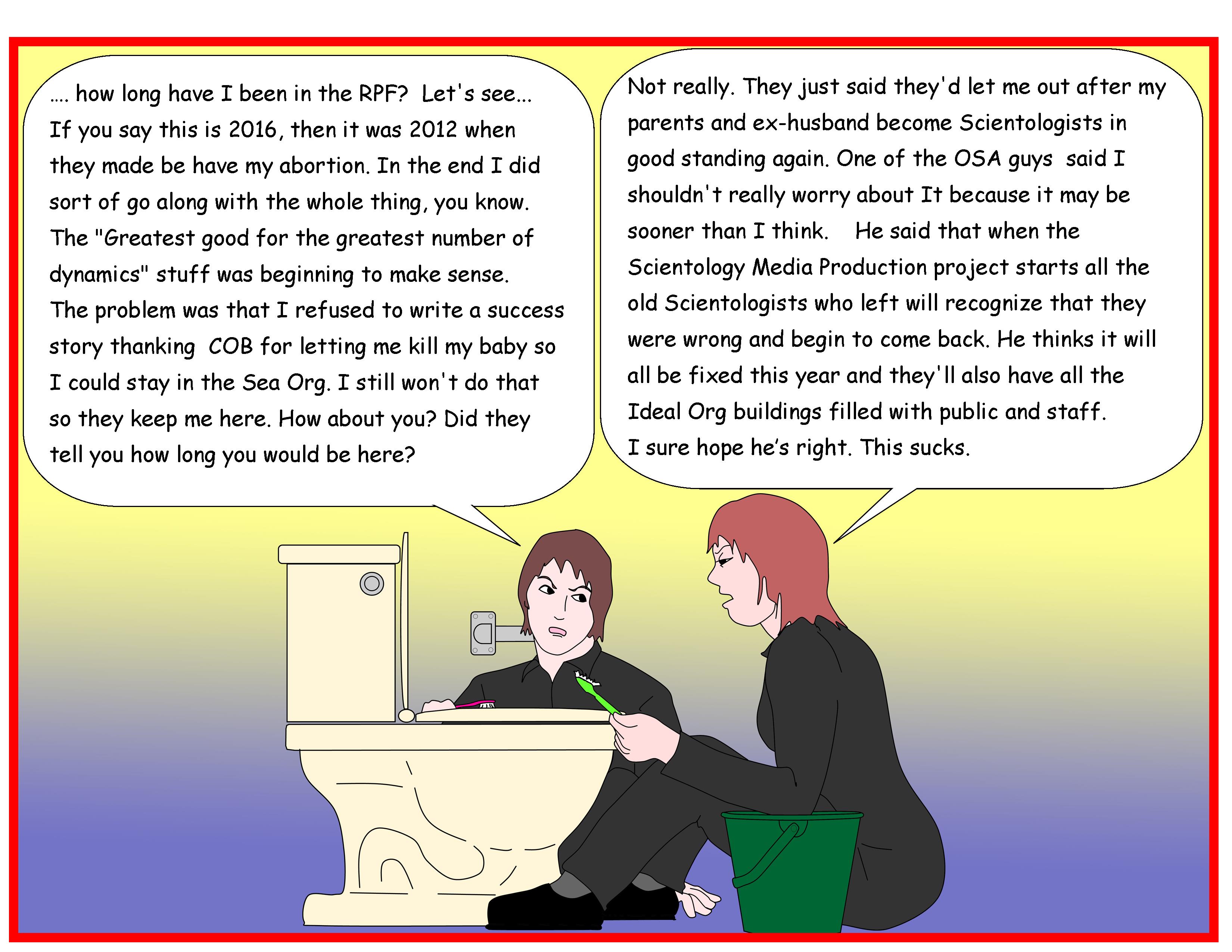
An electric toothbrush would work better, but that probably won’t happen until the same time as the Central Files get computerized, in other words never. An Oral B along with some Comet cleanser would get the pots sparking clean.
Hi Richard, Where were you when I needed you!! If I had been allowed electric toothbrushes and Comet I would have been in hog heaven! As it was policy said Elbow Grease & TSP & do not let those TRs go out! Always,Ann B.
Hi RB, Oh this is just fantastic! Absolutely laser force light on the do as I say not as I do creed of the cult.You make Fridays glow and remind me of SO days gone by and SO days now.Love-bomb on the outside,screw you once you are on the inside if you waver one iota from Ron/DM.Love U & yours.Ann
How powerful is the “Tech” if people can’t look at a billboard because it just might take away all of their so-called gains? Or might entubulate them? I say they’re all sissies! So much for confront. Cult members have the lowest confront I know.
Now there is a guy that does not fit into the realm of reason. I really don’t get it.
He has put himself into a box of impenetrable ignorance. I suppose that is true for all practicing Scientologists, but Tom is uniquely public. It must be quite a job, for him personally, to keep the enlightening world so completely shut out.
I’m told he does not read. At all. That he suffers some sort of dyslexia in that regard.
Perhaps that works in his favor when working as an actor.
But that would leave the avenue of enlightenment closed save for the opportunity of one-on-one human interaction. And his number one guy? Oh, yeah. Dave. I think we all here have a handle on that particular personality-type, what he is capable of, especially in the realm of coercion and deception and most notably the lack of compassion in order to press your own self-interests. Dave wins the prize there, no doubt. It is a sad day for anyone who tries to model himself after David Miscavige, or chooses to call the man: “friend”.
And, come to think of it, I doubt that there are even a few other human beings, if any, on Earth that Tom Cruise looks up to… especially since he lacks the inclination. I mean, really, is it not safe to say that Tom is a little over-the-top into himself?
Birds of a feather.
I guess it does make some sense, when asking the question, “How can this be?”
So, the manipulative skills of the church is still a real thing, despite everything.
And this is no time to be silent.
If there were one person besides the leader with the power to shut the prison down, it would have to be Tom…
– a condemned man, to be sure. Wealthy king of his own castle, and condemned, most likely until he passes.
Prince just passed away. What is happening in the world anyway. Wasn’t quite ready for that; made me say that. I was a disco DJ at the time… wanted to be a rock n roll disco DJ, but could always get away with playing Prince.
But, Heros, Villians and Lovers… the world a stage.
aint we all movie stars, in a real way?
yes, well this would not be the first troupe in which I was considered to be the pet moron, so, please, don’t judge them all because of anything I happen to say… I just wonder how you knew so well what was going on in my mind, you know, when I pegged the world as a stage.
I will give him props, though. If he is intentionally shunning his daughter Suri, he’s doing a damn good job of it. Hey Tommy Boy! Great job! Keep it up so she forgets all about you. But since you have this raging bromance going with Mr. Tiny, you probably don’t need to see Suri. Besides, Katy is far, far superior as a parent.
Wow, Surfer…
You made me think again how much Tiny and Tommy are truly alike,
throwing away families, side by side (if that’s what’s happening).
Not what you would think, watching the films…
(I am an actor, btw. Before becoming, I developed my hard working for being broke ethic in… you know where)
(so, yeah, I would never knock a guy for being an admired movie-star. Everyone pays dues. Hence my compulsion to respond to Mr. W. – IT IS WHAT YOU DO WITH YOUR FAME THAT COUNTS. I wish I could say I had hope for Tom. But, I don’t think he even has a friend, nor employee, who would ever read anything here, for instance. I put the point in caps, anyway.)
But Tom was a regular guy, before Risky Business. Just another hard-working actor, I would presume. Being a real actor makes it pretty tough to be anything else…, see. People do tend to get the wrong impression about…us.
Tiny was always Tiny, although he matured into “let him die” Tiny.
Make no mistake about that.
I was an entertainer: Acting, musical acting, music, stand-up, radio and M/C. However, as you know since you’re in the industry, you need to get a contract. I guess I wasn’t good enough for that. I’m trying to write a book that will get me back in the industry for one final try.
Do it! Just write the book, yes yes yes. Hell yes you’re good enough. I’ll race ya. First one out gets the contract…
Speaking of books, Miscavige’s father, Ron, has RUTHLESS coming out in May.
And watch for the new film, MY SCIENTOLOGY STORY, featuring an actor playing David Miscavige (can you believe that? So much for fear of reprisal) and I think Marty Rathbun is starring as Marty Rathbun, too. Oh, man. Great day to be a writer, if it’s all true. (maybe I’m the last guy to crawl out of his cave and hear this)
I think this really does signal the end of one dangerous cult, and the beginning of a new, slightly more civilized and much saner world.
Hi Orwell, It is good to meet you.I have followed your posts and thank you for the info on this new film.I happen to be one of the last ladies to crawl out of her cave and as you posted in your last part,it would be such a lovely view of a slightly more civilized,saner and may I add loving world when this out of control dangerous cult flees the sunlight of Truth and dissolves like a mist soon forgotten on the winds.Always,Ann.
I think you give Tom Cruise too much credit. I don’t think he’s ignorant, I think he knows and chooses to be involved anyway. He probably enjoys the feeling of “power” he gets from it and being close to Miscavige. The sense of being in an “elite” group. The things they will do for him (personal services, spying on wife, tapping his phone, who knows what else) There is no way Tom Cruise is unaware that Scientology is a harmful cult. He either chooses to remain in because he wants to, or they have too much on him that he doesn’t want made known.
My prior comment was to an earlier post, I hadn’t seen the other comments above yet – agree with OSD on Katie being a better parent to Suri if for no other reason than she had the clarity to see that Scn would not be a good thing for her daughter.
Right on, T.J! She got her out at age 6 because that’s when they start putting them on the E-meter. AT 6 YEARS OF AGE!!! Brainwashing starts very early in this cult!
Wow, 6 years old, that is young. 🙁 I agree, they start it early, good for Katie that she got Suri away from all that. Have a great weekend! *hugs* – T.J.
Hi T.J., You nailed it for me regarding tc! Thank you for a laugh but also a sadness that those still in have to cross paths with tc & dm and be their slaves.xxoo Ann B.
Tom and Tiny Dave sit around and talk about how they are ‘tough sons of bitches’ and they have to do what they do (ignore 9 year old girls) because, if they didn’t, the world would be lost.
So, as Tom once said, ‘I would like to take vacations……but I can’t…..we’re the only ones who can help’.
Tom’s probably thinking ‘I’d like to visit with my daughter, but I can’t. I MAKE MOVIES. That is much more important. People see my movies and want to become scientologists. That is what COB has told me, so it must be true.
The Ideal Orgs are standing room only. Diabetics is flying off the bookstore shelves!’
That’s the sad reality…..they believe they are helping. They surround themselves with sycophants who tell them they are wonderful and saving the world.
It would take a whole lot of courage for Tom to actually open his eyes and become informed. Not sure if he has it in him.
Tom Cruise lives by a rigid set of rules and precepts set out by Scientology, which controls his actions, but he knows his chosen ‘system of belief’, or ‘standards for living’, is not one shared by many, and he isn’t insulated from information about the ‘church’ like some Sea Org members are, he is out and about in the real world, free to read news articles, opinion pieces, talk to people. He must be aware of the objections voiced to the CofS.
So at this point it is a conscious choice to follow this religion or ‘system of beliefs and practices’ – he has other options but chooses to remain within this group. I have no respect for the way he influenced his children to shun their mother, Nicole Kidman. Leah Remini wrote about that in her book, and it’s heartbreaking to hear what their daughter said about her mother.
Cry no tears for Tom Cruise, but for the real victims of Scientology – the children who are coerced, influenced and manipulated to disconnect, and the parents whose children are withheld from them.
I think Tom Cruise is perfectly unnaware of the bad side of scientology. Like many of my friends who disconnected from me. They cannot see. They are sure they possess a wonderful tech. And it’s true, that tech is wonderful on many aspect and people can have wins. And the group is giving reality to the wins. it’s also an utopy. They don’t notice outpoints. Those who can are very lonely even when out of the church as they know the value of the tech but are aware that under Miscavige guidance their hope has been betrayed.
That’s something to think about. I can see what you are saying. I wonder if many people are fully convinced of the tech, or if it’s just easier to keep their social group or whatever than try to leave?
Probably you meant me, giving too much credit to Mr. Cruise.
-and I understand that point of view. I do think the guy is worth salt as a human being. And you must be right, that he LOVES his position in the church…
My point was simply that he could, if he chose to come out, actually shut the place down. Too bad, that he does so well pretending to be a superhero when he could become a regular hero in real life…
Look, there are an estimated billion people on the planet that have heard of Scientology simply because of the name Tom Cruise. (I read that somewhere but, sorry, can’t name the source)
I think it is safe to say that he is the church’s most valuable asset, and that would be proven the day he stepped up to the podium and simply said,
“Sorry, I was wrong.”
But, apparently he is unable to say that, even to his own daughter.
And then I do say that the bubble surrounding him is far too thick, partly by his own construction, effectively preventing the possibility from entering the realm of plausibility. And Surfer Dude is so cool to say that, for Suri, so much the better. Just stay out of the rest of our lives as well. Damn if I’ll ever pay to see any movie that has anything to do with you or United Artists, for that matter, at least until they man up and say something about it… There is, after all, justice to be had.
I’m only sorry that I am but one man to boycott Tom Cruise,
Great points for sure, I hear you! I’ve also heard other people say they boycott Tom Cruise movies & projects, so you are not alone. I really believe the CofS is going down, down, down and will hit ground soon, with the remaining members scattering in all directions… it just can’t persist much longer can it?
– – that’s right, T.J. – –
A perfect image, bliss for the mind
is a cosmic perfect storm, like that of Pisces, only three tears squeezed into the galactic hurricane instead of two, like a black hole only the size of two universes, the swirling energy not even aware of the puny church as it falls into oblivion, outside the realms of both space and time. All that’s missing now is my Tiny Tim record, then and only then will I be happy.
Brilliant post Bentley. If TC could ever open his eyes and speak out, it would greatly damage the cult. DM knows this and probably bends over at every opportunity. Like you say, what he is doing to his family is terrible but good Suri is out. The 2 short-asses will have their $500 bottles of scotch and happily smoke their cigars together while DM’s disconnection policies causes grief to so many.
The only TC movie that I liked was Top Gun. Stressing the word “liked”. I may have seen a few other of his stupid movies but I don’t remember any of them. In a nutshell, TC and his movies suck and I have no desire to watch any of them.
Maybe we can count on Lisa Marie to do some heavy damage to the both of them.
I think he got into scn just after Top Gun…
but now I gotta boycott them all anyway.
Maybe sometime I’ll pick up a microphone and say something about it,
the subject of Tom and why he,… actually its all just disgusting, bottom line.
btw,
thanks everybody for the acknowledgements.
This site has gotten noticeably friendlier since last I was here.
Everyone is supportive, …
Right?
Or even, dare I say the word… loving?
Feels as if everyone feels like they are winners now, or more so than before.
The church IS going down, and the time has come to just, well, be happy.
Congratulations, really, to everyone. We really are doing it!
I love the way Roberto from Mexico put it:
no more outside intervention needed.
Yeah, Tom turns out to be rather tiny as well. (He) Just doesn’t matter.
(well, there are broken families to patch up, one individual at a time. What a mess)
but, come on…
its miller time.
[ps: appreciation to Kate Holmes for… doin’ it right.]
ok,
yeah. I meant to say Risky Biz, my broken brain still occasionally sticks out like a sore thumb, huh?
I think they floated my needle not because my life was repaired, but rather because I had just finished paying them off for it, by borrowing.
(thanks to the ‘credit union’ set up by the very same mission, which, get this, was named “The Freedom Federal Credit Union”. Yes, it is legal to call your church-bank anything you want, but I think it was the Feds that came in and shut that front-shop down, for reasons that became obvious way too late for me…) Guiness Book of Records (sp) should open up some new categories under the heading of False Promises, but it would take up too many pages under the same banner of Scientology.
And tom has never called me, not even once.
I ain’t cryin no more.
But I got a thing or two left to say about the integrity of this cult, and the leader and the veritable spokes-person nearly as famous as Christ.
Lets just see who melts down first, me or this forsaken pseudo-…
excuse me. Nature calls and I have to deal with relative importances.
An RB masterpiece.
Reading RB is like sometimes dropping by the cherch and seeing how the thinking of the still trapped Koolaid Drinkers keeps getting crazier as scientology keeps on imploding.
In 10 or so years when the world is fully cleared of scientology and our memories of the insanities have faded it would be fun to revisit the cartoons and scratch our heads how anyone could have been part of this racket.
Hey, look what I just found… the whole story about what AND how it happened to me at COS-MOD, concerning this Freedom Fed Credit Union. From the Scn Message Board:
Once upon a time, before disco was invented, there was a fellow named Bruce Wiseman who enjoyed setting up Scientology front groups. Being then resident in Sacramento, and working closely with Martin Samuels’ COSMOD mission there, he set up a credit union, which was then plundered. Here’s how it worked: investors were regged for significant amounts of money, typically in the tens of thousands of dollars. This was used to fund Freedom Federal Credit Union, which then began loaning the money to COSMOD public (to pay for services, I didn’t hear of a single loan for any other purpose), and which gave very preferential treatment to those who intended to become COSMOD staff. (COSMOD then had requirements for new staff which were quite rigorous, IIRC they had to be at least Dianetic auditors, with their Academy Levels paid for, and to have had a fair amount of auditing themselves.)
FFCU loaned out all of its cash within a year or two, boosting both COSMOD’s income and staff numbers, allowing for the Delphian Foundation and the new COSMOD Portland mission to be staffed, and providing enough students wanting to do the Academy Levels that the Sacramento Org was founded almost immediately after FFCU began operation. With no more cash to work with, FFCU was liquidated and taken over by the National Credit Union Administration. All of the investors were safe up to the $100,000 level, since the federal government guarantees that to customers of banks and credit unions. But very few of those who received the loans could pay them back. I heard stories of extremely demoralized NCUA employees calling up people with debts to FFCU, saying “I guess you’re on staff, have no assets and make essentially nothing, is that right?” They couldn’t collect anything from people making $15 a week, so at least 80% of them ended up defaulting on their loans. In this way Wiseman paid for somewhere around a million (mid-1970s) dollars worth of Scientology services with taxpayer money.
Quite an ingenius scam, wasn’t it?
-that’s it.
And, yes, that does describe how I got locked into Staff, I do testify.
What a day this is. God, I love the truth, honestly.
Why the whole (tax-paying) country doesn’t go up in arms is what makes me wonder.
Of course Leslie is talking physics. It’s a language that I speak fluently. Too bad that your scientific education (and I use that term loosely) started and ended with L. Fraud.
Leslie, El Con was projecting. HE was a stimulus response ‘bot. that’s why he wasn’t smart enough to get through college, why he attacked Mexico during WW 2, et al.
Hell, didn’t he flunk out of high school? Hubbard was NOT a smart man. When I first got in I was told he had a degree in mathematics as well as engineering. 95% of of is bio is completely made up.
Hubbard, being the superb Captain of the ship, entered Mexican waters and shelled an island that fisherman use. Luckily no one was on the island at the time. He was then demoted.
Hi OSD, For some reason I have always loved that tale! So much for sailing the Seven Seas in complete hurricane force winds,all the while scrambling up the eggs and dictating the a Sea Org tapes for good measure! And I believed it all! xo Ann.
I’m on an iPad and for some reason RB’s fantastic artwork is not showing up on my screen anymore. Anyone else getting the little blue square with the ? In it?
Are you using Safari, Chrome or some other browser? Try tapping each panel and you should get a pop-up containing just that panel. Or try a save image (they save as .jpg on my Windows 10 lappy).
Just wanted to share what I found about my ipad issue.if I select a panel and open in another tab in Safari, it works but is slow. I cleared history and cookies, still not working like used to. I opened RB post in chrome, and works as before… I suspect us with issues have teenagers that spuraticly take our iPads and do God knows what with them… Is the case in my house… And I suspect Mr. Suffer dude…has not such teenagers f’ing with his ipad… Best regards to all
A reminder of how close I came to being another hashmark on
David Miscaviges Hit List. My only stable datum prior to Scientology
was the Douglas A 4 Escapac ejection seat. In the Church I began to learn
outside the box where there was no handle to pull and say bye bye to a
rotten situation.
Looks true. I would NEVER had gone into the RPF. Complete punishment & degradation designed by the psycho El Con. I remember that El Con gave his Schutzstaffel staff (CMO) the power to send anyone to the RPF on a whim. Amazing parallel. Most of the CMO were young, incompetent and inexperienced. Just like the real Schutzstaffel.
The wisdom behind your philosophy ranks right up there with the Dalai Lama,
and the veritable Siddhartha Gautama himself, Old Surfer Dude.
Enlightening, to be in your presence, sir.
Tommy J, exactly what I was thinking! Thanks for saying it.
When someone is in a position of trust and power, they should not abuse it.
I think part of the problem is when someone is promoted to an authority position in an established hierarchy of an agency with oversight & held to measurable standards (such as in governmental agencies, the armed forces, etc) it is assumed that they have earned that position and possess the skills, knowledge, and ability to hold that position, and so one tends to respect their word.
In the Sea Org there is no such requirement, anyone can be put in a position even though they may not be qualified to hold it, but still people are conditioned to trust and follow the word of an authority figure. So this type of situation can and does happen.
“When someone is in a position of trust and power, they should not abuse it.” T.J., you’re absolutely right! However, abuse is endemic in the cult. Maybe it should read:
“When someone is in a position of trust & power, they should absolutely abuse the shit out of every single person there. Why? Because that’s the only way to get their attention…
OSD you are always speaking the truth! and I love it.
So, the person who makes a power grab and assumes leadership (or inherits it, as in North Korea, where the 3rd Kim assumed the power passed down from his father and grandfather) – is not always the person who is the best suited to hold that position. Not the best leader, not the most trustworthy, not the one with the best intentions or best ideas, not the most dedicated… just the best at getting the power.
Another example is in the FLDS (the fundamental mormon group) where Warren Jeffs (jailed sect leader still officially in charge) grabbed the power when his Father Rulon Jeffs died, although he was not the person named to head the sect.
Miscavige moved to grab power upon the passing of LRH – in both these cases the person who assumed the power was not the person who was designated – but the leaders moved to consolidate their power by getting rid of anyone who would be a threat (Jeffs eliminated and cast out the high level bishops named to succeed the elder Jeffs) just as Miscavige ousted Pat Broeker and isolated or expelled other high ranking officials, so that they would not be able to pose a threat to his reign.
Where did L.Ron Hubbard ever declare that David Miscavige should assume leadership of the CofS? Can anyone point out where LRH stated that was his intent?
But here is why no one can challenge him, Miscavige has set up a system of power where he answers to no one. In a corporation, the Board of Directors can vote out the CEO – just as Apple did to founder Steve Jobs at one time (he came back 6 years later) because they saw he wasn’t acting in the best interest of the company… but although Miscavige is called “Chairman of the Board” – there is no board. So who can expel Miscavige? There is no system of checks and balances on his power.
No one should have absolute power with no recourse for removal – the President of the United States answers to others and can be impeached and removed from office… but as in North Korea, where there is no mechanism to get rid of Kim Jong Un, there is none to rid the church of Miscavige. Scientology is a little North Korea with a little corrupt leader.
Quote: “power corrupts, and absolute power corrupts absolutely” – Sir John Acton
Warren Jeffs was grabbing a whole lot more than power. So, as I read you , all of these so-called leaders are actually frauds as they were never vetted, to see if they could do the job? Of course they were. That’s how tyrants gain power. The grab it…
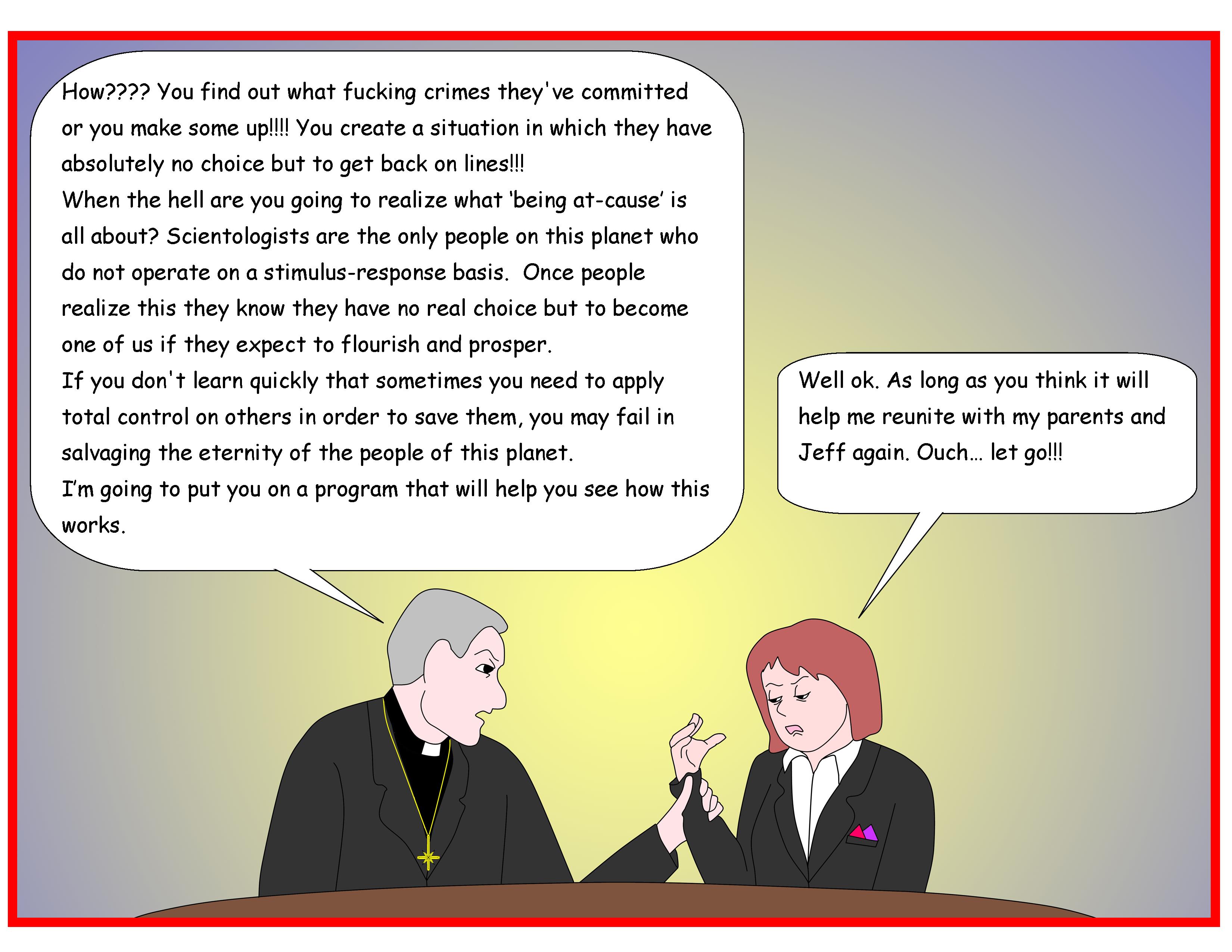
“if you don’t learn quickly that sometimes you need to apply total control on others in order to save them…”
Frightening. How many false prophets, charismatic “messiahs” and totalitarian governments are built upon this very premise? All of them.
On a side note, check out the comments thread on The Register, a British IT site. Scroll down to the “I went to university down in Brighton…” thread and have a look. Their comments on Scientology’s dissemination are classic and very, very funny.
W & O, you NAILED it! Post of the day, if not the week. One important way of immunizing people against the Cult is spotting what it does, then telling people ALL about it. Who then run away screaming…..
Just as a side note…while everyone talks about Disconnection policy and SPs, they push disconnection from people who are NOT SPs. The church worked overtime pressuring my spouse to divorce me over a year BEFORE they declared me.
How is that justified? I was not an SP. I had no outstanding Ethics Orders. They just decided the best thing (undoubtedly based on the Greatest Good), was that we divorce and break up the family.
Oh, my. This one, as usual, is totally spot on. Wouldn’t it be sweet if someone in the RPF were powerful enough and convincing enough to create huge upsurge of real freedom and have all of them just walk out of what they’re doing? Ah, Peter, dream on! LOL
Hi MostEthicalPimp, Good post.How about a double feature ” Revolt in the RPF ” followed by that classic ” Revolting In The Stars “, another Ron pot-boiler of a space opera script. Laughter! xo Ann.

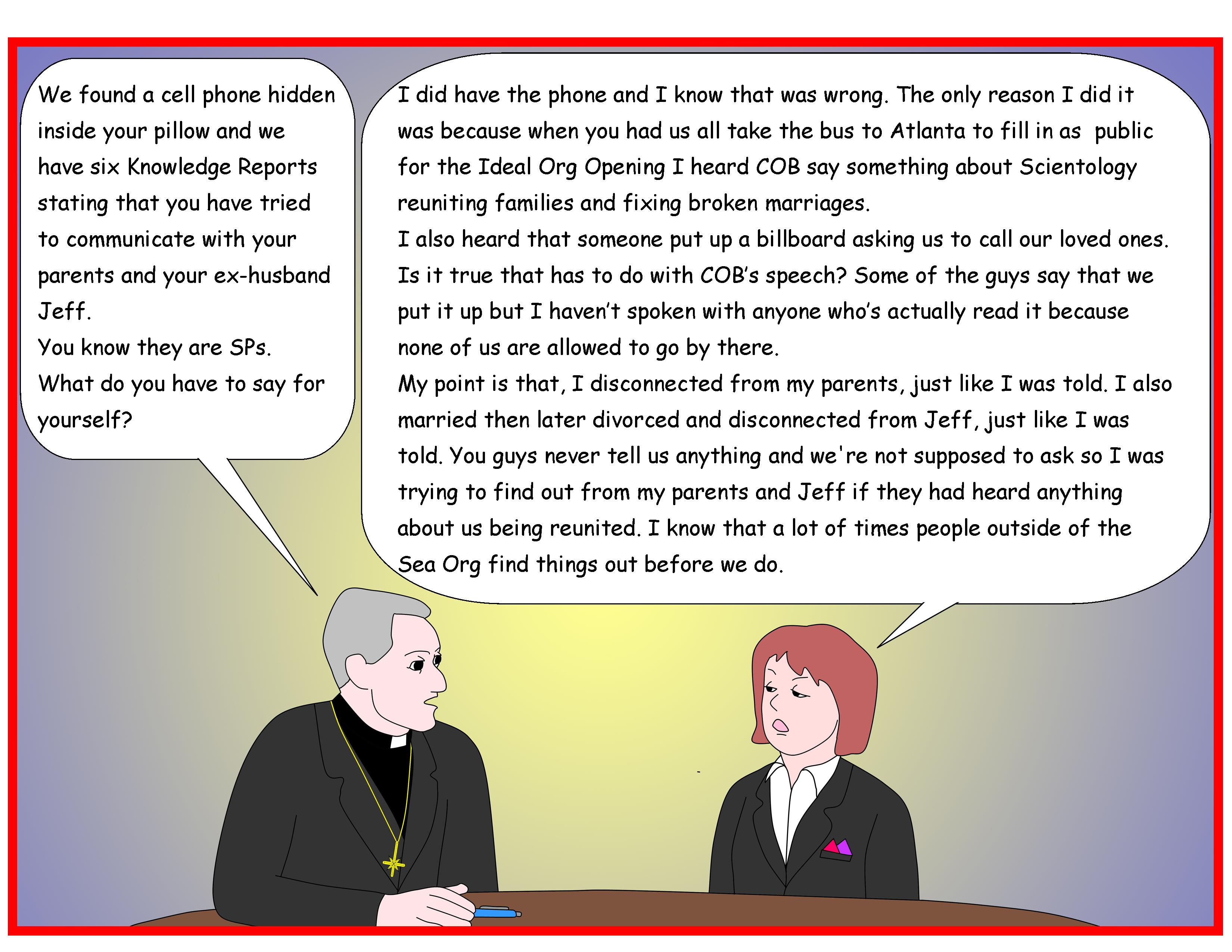





So she contacted her parents and ex, because she wanted to reunite with her peoples and then she goes into the RPF instead.
That’s some cray cray on display.
Stockholm syndrome is real.
To the weak minded many things are “real”.
“ouch”
Reality bites.
May I presume this to be a call for practicing concentration and joyful perseverance in the pursuit of knowledge?
Ever met me gtsix ? I will aways resp[ond if you ask me something. Former Anon. Not so relevant poster. So we are on the same level:
https://www.youtube.com/watch?v=K5txaMWPB7M
RB, right on the mark as always. We look forward to Fridays and seeing your strip.
RB, you are a genius!
Even the toothpaste is the worn out variety, dm-issue!
Just perfect.
An electric toothbrush would work better, but that probably won’t happen until the same time as the Central Files get computerized, in other words never. An Oral B along with some Comet cleanser would get the pots sparking clean.
Hi Richard, Where were you when I needed you!! If I had been allowed electric toothbrushes and Comet I would have been in hog heaven! As it was policy said Elbow Grease & TSP & do not let those TRs go out! Always,Ann B.
Hi RB, Oh this is just fantastic! Absolutely laser force light on the do as I say not as I do creed of the cult.You make Fridays glow and remind me of SO days gone by and SO days now.Love-bomb on the outside,screw you once you are on the inside if you waver one iota from Ron/DM.Love U & yours.Ann
How powerful is the “Tech” if people can’t look at a billboard because it just might take away all of their so-called gains? Or might entubulate them? I say they’re all sissies! So much for confront. Cult members have the lowest confront I know.
OSD, as powerful as all the OTs that cannot handle an asthmatic dwarf?
Sounds about right…He’s a total scumbag.
Tom Cruise has that power.
Now there is a guy that does not fit into the realm of reason. I really don’t get it.
He has put himself into a box of impenetrable ignorance. I suppose that is true for all practicing Scientologists, but Tom is uniquely public. It must be quite a job, for him personally, to keep the enlightening world so completely shut out.
I’m told he does not read. At all. That he suffers some sort of dyslexia in that regard.
Perhaps that works in his favor when working as an actor.
But that would leave the avenue of enlightenment closed save for the opportunity of one-on-one human interaction. And his number one guy? Oh, yeah. Dave. I think we all here have a handle on that particular personality-type, what he is capable of, especially in the realm of coercion and deception and most notably the lack of compassion in order to press your own self-interests. Dave wins the prize there, no doubt. It is a sad day for anyone who tries to model himself after David Miscavige, or chooses to call the man: “friend”.
And, come to think of it, I doubt that there are even a few other human beings, if any, on Earth that Tom Cruise looks up to… especially since he lacks the inclination. I mean, really, is it not safe to say that Tom is a little over-the-top into himself?
Birds of a feather.
I guess it does make some sense, when asking the question, “How can this be?”
So, the manipulative skills of the church is still a real thing, despite everything.
And this is no time to be silent.
“He has put himself into a box of impenetrable ignorance. …”
Bentley, pretty much par for the course for “movie stars”.
If there were one person besides the leader with the power to shut the prison down, it would have to be Tom…
– a condemned man, to be sure. Wealthy king of his own castle, and condemned, most likely until he passes.
Prince just passed away. What is happening in the world anyway. Wasn’t quite ready for that; made me say that. I was a disco DJ at the time… wanted to be a rock n roll disco DJ, but could always get away with playing Prince.
But, Heros, Villians and Lovers… the world a stage.
aint we all movie stars, in a real way?
“aint we all movie stars, in a real way?”
No. Not in that way. Most I’ve been around (on set) are a cut far below on the IQ side than the human norm.
Well….I am!
yes, well this would not be the first troupe in which I was considered to be the pet moron, so, please, don’t judge them all because of anything I happen to say… I just wonder how you knew so well what was going on in my mind, you know, when I pegged the world as a stage.
um, to whom am I speaking?
Sorry OSD, you don’t qualify as a low IQ douche. Alas!
I will give him props, though. If he is intentionally shunning his daughter Suri, he’s doing a damn good job of it. Hey Tommy Boy! Great job! Keep it up so she forgets all about you. But since you have this raging bromance going with Mr. Tiny, you probably don’t need to see Suri. Besides, Katy is far, far superior as a parent.
Wow, Surfer…
You made me think again how much Tiny and Tommy are truly alike,
throwing away families, side by side (if that’s what’s happening).
Not what you would think, watching the films…
(I am an actor, btw. Before becoming, I developed my hard working for being broke ethic in… you know where)
(so, yeah, I would never knock a guy for being an admired movie-star. Everyone pays dues. Hence my compulsion to respond to Mr. W. – IT IS WHAT YOU DO WITH YOUR FAME THAT COUNTS. I wish I could say I had hope for Tom. But, I don’t think he even has a friend, nor employee, who would ever read anything here, for instance. I put the point in caps, anyway.)
But Tom was a regular guy, before Risky Business. Just another hard-working actor, I would presume. Being a real actor makes it pretty tough to be anything else…, see. People do tend to get the wrong impression about…us.
Tiny was always Tiny, although he matured into “let him die” Tiny.
Make no mistake about that.
+1
you’re quite the character, Bentley.
I was an entertainer: Acting, musical acting, music, stand-up, radio and M/C. However, as you know since you’re in the industry, you need to get a contract. I guess I wasn’t good enough for that. I’m trying to write a book that will get me back in the industry for one final try.
Do it! Just write the book, yes yes yes. Hell yes you’re good enough. I’ll race ya. First one out gets the contract…
Speaking of books, Miscavige’s father, Ron, has RUTHLESS coming out in May.
And watch for the new film, MY SCIENTOLOGY STORY, featuring an actor playing David Miscavige (can you believe that? So much for fear of reprisal) and I think Marty Rathbun is starring as Marty Rathbun, too. Oh, man. Great day to be a writer, if it’s all true. (maybe I’m the last guy to crawl out of his cave and hear this)
I think this really does signal the end of one dangerous cult, and the beginning of a new, slightly more civilized and much saner world.
Hi Orwell, It is good to meet you.I have followed your posts and thank you for the info on this new film.I happen to be one of the last ladies to crawl out of her cave and as you posted in your last part,it would be such a lovely view of a slightly more civilized,saner and may I add loving world when this out of control dangerous cult flees the sunlight of Truth and dissolves like a mist soon forgotten on the winds.Always,Ann.
yes, and your light provides a most pleasant
Ann lovely-ness, if I may say.
I will, Orwell, I certainly will. I’m semi-retired so I do have the time. And, of course, one chapter will be about my time in the cult.
Thanks for the props!
On April 29th on 20/20 show, Ronnie Miscavige will be interviewed about his tell all book about his son, David, let him die, Miscavige. Tune in.
OSD – If you need a reference to get back into the industry, I’ll vouch for you. Tell em a Clear Muthfkr is on your side and that’ll get some respect!
Laughter! Thanks, Richard!
Bentley is one cool dude….
what… did i say somethin?
We all like your posts!
I think you give Tom Cruise too much credit. I don’t think he’s ignorant, I think he knows and chooses to be involved anyway. He probably enjoys the feeling of “power” he gets from it and being close to Miscavige. The sense of being in an “elite” group. The things they will do for him (personal services, spying on wife, tapping his phone, who knows what else) There is no way Tom Cruise is unaware that Scientology is a harmful cult. He either chooses to remain in because he wants to, or they have too much on him that he doesn’t want made known.
My prior comment was to an earlier post, I hadn’t seen the other comments above yet – agree with OSD on Katie being a better parent to Suri if for no other reason than she had the clarity to see that Scn would not be a good thing for her daughter.
Right on, T.J! She got her out at age 6 because that’s when they start putting them on the E-meter. AT 6 YEARS OF AGE!!! Brainwashing starts very early in this cult!
Wow, 6 years old, that is young. 🙁 I agree, they start it early, good for Katie that she got Suri away from all that. Have a great weekend! *hugs* – T.J.
I shall, T.J. My band is playing tonight at a place called Don the Beachcomber.
Hi T.J., You nailed it for me regarding tc! Thank you for a laugh but also a sadness that those still in have to cross paths with tc & dm and be their slaves.xxoo Ann B.
Thanks Ann B! Thinking of you today, sending love and good wishes for a happy weekend. 🙂
Tom and Tiny Dave sit around and talk about how they are ‘tough sons of bitches’ and they have to do what they do (ignore 9 year old girls) because, if they didn’t, the world would be lost.
So, as Tom once said, ‘I would like to take vacations……but I can’t…..we’re the only ones who can help’.
Tom’s probably thinking ‘I’d like to visit with my daughter, but I can’t. I MAKE MOVIES. That is much more important. People see my movies and want to become scientologists. That is what COB has told me, so it must be true.
The Ideal Orgs are standing room only. Diabetics is flying off the bookstore shelves!’
That’s the sad reality…..they believe they are helping. They surround themselves with sycophants who tell them they are wonderful and saving the world.
It would take a whole lot of courage for Tom to actually open his eyes and become informed. Not sure if he has it in him.
Tom Cruise lives by a rigid set of rules and precepts set out by Scientology, which controls his actions, but he knows his chosen ‘system of belief’, or ‘standards for living’, is not one shared by many, and he isn’t insulated from information about the ‘church’ like some Sea Org members are, he is out and about in the real world, free to read news articles, opinion pieces, talk to people. He must be aware of the objections voiced to the CofS.
So at this point it is a conscious choice to follow this religion or ‘system of beliefs and practices’ – he has other options but chooses to remain within this group. I have no respect for the way he influenced his children to shun their mother, Nicole Kidman. Leah Remini wrote about that in her book, and it’s heartbreaking to hear what their daughter said about her mother.
Cry no tears for Tom Cruise, but for the real victims of Scientology – the children who are coerced, influenced and manipulated to disconnect, and the parents whose children are withheld from them.
I think Tom Cruise is perfectly unnaware of the bad side of scientology. Like many of my friends who disconnected from me. They cannot see. They are sure they possess a wonderful tech. And it’s true, that tech is wonderful on many aspect and people can have wins. And the group is giving reality to the wins. it’s also an utopy. They don’t notice outpoints. Those who can are very lonely even when out of the church as they know the value of the tech but are aware that under Miscavige guidance their hope has been betrayed.
That’s something to think about. I can see what you are saying. I wonder if many people are fully convinced of the tech, or if it’s just easier to keep their social group or whatever than try to leave?
Probably you meant me, giving too much credit to Mr. Cruise.
-and I understand that point of view. I do think the guy is worth salt as a human being. And you must be right, that he LOVES his position in the church…
My point was simply that he could, if he chose to come out, actually shut the place down. Too bad, that he does so well pretending to be a superhero when he could become a regular hero in real life…
Look, there are an estimated billion people on the planet that have heard of Scientology simply because of the name Tom Cruise. (I read that somewhere but, sorry, can’t name the source)
I think it is safe to say that he is the church’s most valuable asset, and that would be proven the day he stepped up to the podium and simply said,
“Sorry, I was wrong.”
But, apparently he is unable to say that, even to his own daughter.
And then I do say that the bubble surrounding him is far too thick, partly by his own construction, effectively preventing the possibility from entering the realm of plausibility. And Surfer Dude is so cool to say that, for Suri, so much the better. Just stay out of the rest of our lives as well. Damn if I’ll ever pay to see any movie that has anything to do with you or United Artists, for that matter, at least until they man up and say something about it… There is, after all, justice to be had.
I’m only sorry that I am but one man to boycott Tom Cruise,
Great points for sure, I hear you! I’ve also heard other people say they boycott Tom Cruise movies & projects, so you are not alone. I really believe the CofS is going down, down, down and will hit ground soon, with the remaining members scattering in all directions… it just can’t persist much longer can it?
– – that’s right, T.J. – –
A perfect image, bliss for the mind
is a cosmic perfect storm, like that of Pisces, only three tears squeezed into the galactic hurricane instead of two, like a black hole only the size of two universes, the swirling energy not even aware of the puny church as it falls into oblivion, outside the realms of both space and time. All that’s missing now is my Tiny Tim record, then and only then will I be happy.
Brilliant post Bentley. If TC could ever open his eyes and speak out, it would greatly damage the cult. DM knows this and probably bends over at every opportunity. Like you say, what he is doing to his family is terrible but good Suri is out. The 2 short-asses will have their $500 bottles of scotch and happily smoke their cigars together while DM’s disconnection policies causes grief to so many.
The only TC movie that I liked was Top Gun. Stressing the word “liked”. I may have seen a few other of his stupid movies but I don’t remember any of them. In a nutshell, TC and his movies suck and I have no desire to watch any of them.
Maybe we can count on Lisa Marie to do some heavy damage to the both of them.
I think he got into scn just after Top Gun…
but now I gotta boycott them all anyway.
Maybe sometime I’ll pick up a microphone and say something about it,
the subject of Tom and why he,… actually its all just disgusting, bottom line.
btw,
thanks everybody for the acknowledgements.
This site has gotten noticeably friendlier since last I was here.
Everyone is supportive, …
Right?
Or even, dare I say the word… loving?
Feels as if everyone feels like they are winners now, or more so than before.
The church IS going down, and the time has come to just, well, be happy.
Congratulations, really, to everyone. We really are doing it!
I love the way Roberto from Mexico put it:
no more outside intervention needed.
Yeah, Tom turns out to be rather tiny as well. (He) Just doesn’t matter.
(well, there are broken families to patch up, one individual at a time. What a mess)
but, come on…
its miller time.
[ps: appreciation to Kate Holmes for… doin’ it right.]
“I think he got into scn just after Top Gun…”
No, he was WAY into Scn by that point.
ok,
yeah. I meant to say Risky Biz, my broken brain still occasionally sticks out like a sore thumb, huh?
I think they floated my needle not because my life was repaired, but rather because I had just finished paying them off for it, by borrowing.
(thanks to the ‘credit union’ set up by the very same mission, which, get this, was named “The Freedom Federal Credit Union”. Yes, it is legal to call your church-bank anything you want, but I think it was the Feds that came in and shut that front-shop down, for reasons that became obvious way too late for me…) Guiness Book of Records (sp) should open up some new categories under the heading of False Promises, but it would take up too many pages under the same banner of Scientology.
And tom has never called me, not even once.
I ain’t cryin no more.
But I got a thing or two left to say about the integrity of this cult, and the leader and the veritable spokes-person nearly as famous as Christ.
Lets just see who melts down first, me or this forsaken pseudo-…
excuse me. Nature calls and I have to deal with relative importances.
An RB masterpiece.
Reading RB is like sometimes dropping by the cherch and seeing how the thinking of the still trapped Koolaid Drinkers keeps getting crazier as scientology keeps on imploding.
In 10 or so years when the world is fully cleared of scientology and our memories of the insanities have faded it would be fun to revisit the cartoons and scratch our heads how anyone could have been part of this racket.
Hey, look what I just found… the whole story about what AND how it happened to me at COS-MOD, concerning this Freedom Fed Credit Union. From the Scn Message Board:
Once upon a time, before disco was invented, there was a fellow named Bruce Wiseman who enjoyed setting up Scientology front groups. Being then resident in Sacramento, and working closely with Martin Samuels’ COSMOD mission there, he set up a credit union, which was then plundered. Here’s how it worked: investors were regged for significant amounts of money, typically in the tens of thousands of dollars. This was used to fund Freedom Federal Credit Union, which then began loaning the money to COSMOD public (to pay for services, I didn’t hear of a single loan for any other purpose), and which gave very preferential treatment to those who intended to become COSMOD staff. (COSMOD then had requirements for new staff which were quite rigorous, IIRC they had to be at least Dianetic auditors, with their Academy Levels paid for, and to have had a fair amount of auditing themselves.)
FFCU loaned out all of its cash within a year or two, boosting both COSMOD’s income and staff numbers, allowing for the Delphian Foundation and the new COSMOD Portland mission to be staffed, and providing enough students wanting to do the Academy Levels that the Sacramento Org was founded almost immediately after FFCU began operation. With no more cash to work with, FFCU was liquidated and taken over by the National Credit Union Administration. All of the investors were safe up to the $100,000 level, since the federal government guarantees that to customers of banks and credit unions. But very few of those who received the loans could pay them back. I heard stories of extremely demoralized NCUA employees calling up people with debts to FFCU, saying “I guess you’re on staff, have no assets and make essentially nothing, is that right?” They couldn’t collect anything from people making $15 a week, so at least 80% of them ended up defaulting on their loans. In this way Wiseman paid for somewhere around a million (mid-1970s) dollars worth of Scientology services with taxpayer money.
Quite an ingenius scam, wasn’t it?
-that’s it.
And, yes, that does describe how I got locked into Staff, I do testify.
What a day this is. God, I love the truth, honestly.
Why the whole (tax-paying) country doesn’t go up in arms is what makes me wonder.
“Scientologists are the only people on this planet who do not operate on a stimulus-response basis.”
Never mind everyone outside of the White House, Congress, the State and Federal prison systems, along with the governments of Cuba and Venezuela.
Okay, I may have been a bit political there.
Energy equals the square of the mass converted times the speed of light, or E=MC Squared.
Did LRH really believe that Einstein was operating solely on a stimulus-response basis?
I was stimulate once, but, I never responded….
Leslie, are you talking physics?
Regarding any datum, just keep it in context, and use your head.
Hang onto your hat, sir.
Of course Leslie is talking physics. It’s a language that I speak fluently. Too bad that your scientific education (and I use that term loosely) started and ended with L. Fraud.
Leslie, El Con was projecting. HE was a stimulus response ‘bot. that’s why he wasn’t smart enough to get through college, why he attacked Mexico during WW 2, et al.
Hell, didn’t he flunk out of high school? Hubbard was NOT a smart man. When I first got in I was told he had a degree in mathematics as well as engineering. 95% of of is bio is completely made up.
I always wondered what the issue with Mexico was.
Hubbard, being the superb Captain of the ship, entered Mexican waters and shelled an island that fisherman use. Luckily no one was on the island at the time. He was then demoted.
Hi OSD, For some reason I have always loved that tale! So much for sailing the Seven Seas in complete hurricane force winds,all the while scrambling up the eggs and dictating the a Sea Org tapes for good measure! And I believed it all! xo Ann.
I’m on an iPad and for some reason RB’s fantastic artwork is not showing up on my screen anymore. Anyone else getting the little blue square with the ? In it?
sidney, I’m getting it on my iPad.
Yes…last week too.. Looking for help !
Are you using Safari, Chrome or some other browser? Try tapping each panel and you should get a pop-up containing just that panel. Or try a save image (they save as .jpg on my Windows 10 lappy).
click the bue square and the iPad will tell you what is missed in your system ..
That happens to my iPad too (the last two weeks).
Lars, I’m sorry to say this but, my iPad is working great! It must me my Oat Tee powers. You’re probably not as Oat Tee as I am.
Just wanted to share what I found about my ipad issue.if I select a panel and open in another tab in Safari, it works but is slow. I cleared history and cookies, still not working like used to. I opened RB post in chrome, and works as before… I suspect us with issues have teenagers that spuraticly take our iPads and do God knows what with them… Is the case in my house… And I suspect Mr. Suffer dude…has not such teenagers f’ing with his ipad… Best regards to all
The way Regraded Being captures these malignant thought processes is amazing. They just nail it again and again.
A reminder of how close I came to being another hashmark on
David Miscaviges Hit List. My only stable datum prior to Scientology
was the Douglas A 4 Escapac ejection seat. In the Church I began to learn
outside the box where there was no handle to pull and say bye bye to a
rotten situation.
Good one RB
Looks true. I would NEVER had gone into the RPF. Complete punishment & degradation designed by the psycho El Con. I remember that El Con gave his Schutzstaffel staff (CMO) the power to send anyone to the RPF on a whim. Amazing parallel. Most of the CMO were young, incompetent and inexperienced. Just like the real Schutzstaffel.
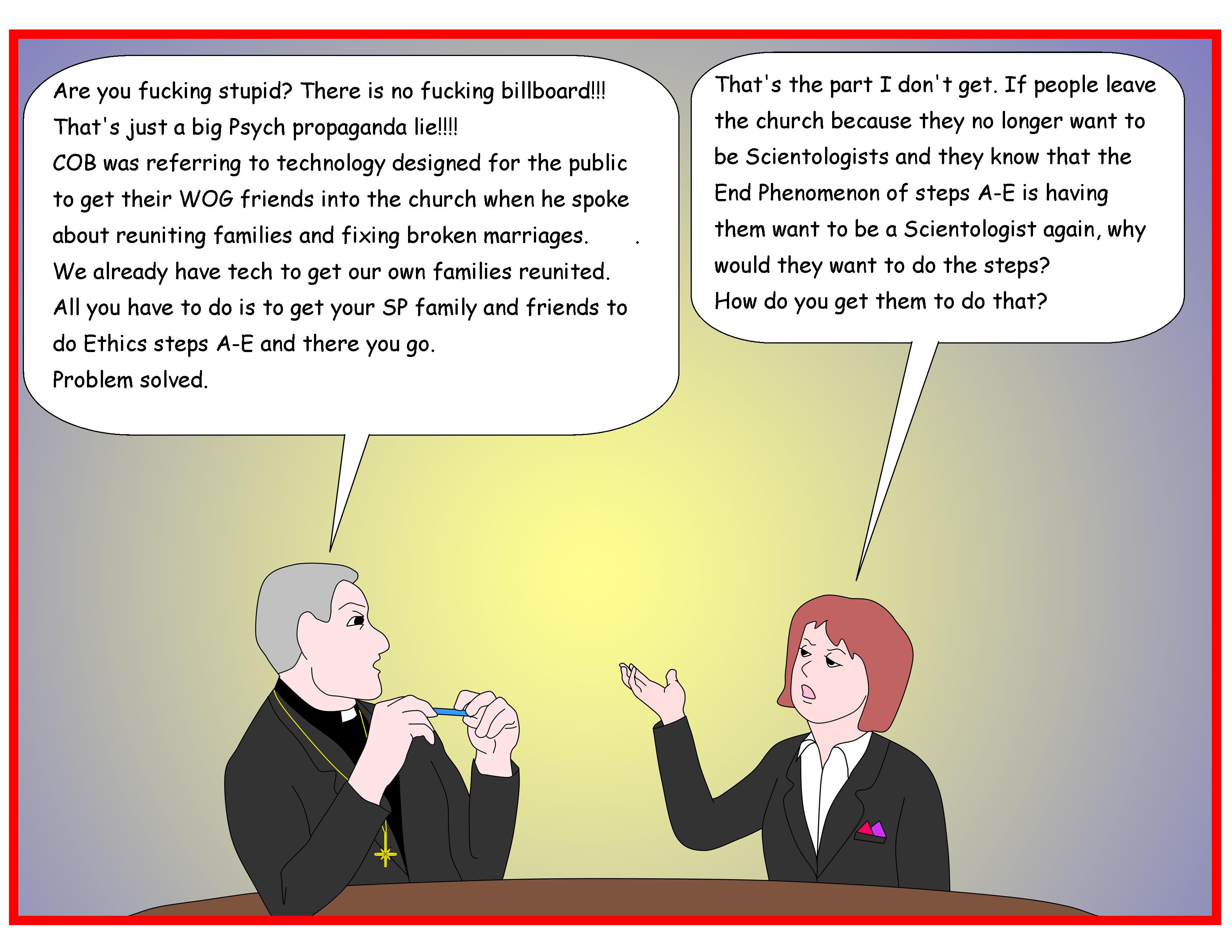
A guy with a collar and a cross saying “Are you fucking stupid?” My God is that sad and scary and creepy and yet true. Another masterpiece RB,
Of course, Tommy J! That’s how they fucking talk in the fucking cult. How fucked up is that?
What the fuck are you talking about OSD?
Holy shit! If you don’t know what I’m fucking talking about how can you expect me to know what I’m fucking about? Don’t put your burden on me….
OMG my friend I am literally warm and fuzzy from having fun on here with u – or it might be the VO and ginger – ahh who the fuck cares!
That’s the spirit, P00pie! As long as we have VO & ginger, who gives a fuck!
OSD,
Since when do you have the fucking rank to give a shit?
I up’d my rank by myself! Now I do, in fact, have the fucking rank to give a shit!
The wisdom behind your philosophy ranks right up there with the Dalai Lama,
and the veritable Siddhartha Gautama himself, Old Surfer Dude.
Enlightening, to be in your presence, sir.
Tommy J, exactly what I was thinking! Thanks for saying it.
When someone is in a position of trust and power, they should not abuse it.
I think part of the problem is when someone is promoted to an authority position in an established hierarchy of an agency with oversight & held to measurable standards (such as in governmental agencies, the armed forces, etc) it is assumed that they have earned that position and possess the skills, knowledge, and ability to hold that position, and so one tends to respect their word.
In the Sea Org there is no such requirement, anyone can be put in a position even though they may not be qualified to hold it, but still people are conditioned to trust and follow the word of an authority figure. So this type of situation can and does happen.
“When someone is in a position of trust and power, they should not abuse it.” T.J., you’re absolutely right! However, abuse is endemic in the cult. Maybe it should read:
“When someone is in a position of trust & power, they should absolutely abuse the shit out of every single person there. Why? Because that’s the only way to get their attention…
OSD you are always speaking the truth! and I love it.
So, the person who makes a power grab and assumes leadership (or inherits it, as in North Korea, where the 3rd Kim assumed the power passed down from his father and grandfather) – is not always the person who is the best suited to hold that position. Not the best leader, not the most trustworthy, not the one with the best intentions or best ideas, not the most dedicated… just the best at getting the power.
Another example is in the FLDS (the fundamental mormon group) where Warren Jeffs (jailed sect leader still officially in charge) grabbed the power when his Father Rulon Jeffs died, although he was not the person named to head the sect.
Miscavige moved to grab power upon the passing of LRH – in both these cases the person who assumed the power was not the person who was designated – but the leaders moved to consolidate their power by getting rid of anyone who would be a threat (Jeffs eliminated and cast out the high level bishops named to succeed the elder Jeffs) just as Miscavige ousted Pat Broeker and isolated or expelled other high ranking officials, so that they would not be able to pose a threat to his reign.
Where did L.Ron Hubbard ever declare that David Miscavige should assume leadership of the CofS? Can anyone point out where LRH stated that was his intent?
But here is why no one can challenge him, Miscavige has set up a system of power where he answers to no one. In a corporation, the Board of Directors can vote out the CEO – just as Apple did to founder Steve Jobs at one time (he came back 6 years later) because they saw he wasn’t acting in the best interest of the company… but although Miscavige is called “Chairman of the Board” – there is no board. So who can expel Miscavige? There is no system of checks and balances on his power.
No one should have absolute power with no recourse for removal – the President of the United States answers to others and can be impeached and removed from office… but as in North Korea, where there is no mechanism to get rid of Kim Jong Un, there is none to rid the church of Miscavige. Scientology is a little North Korea with a little corrupt leader.
Quote: “power corrupts, and absolute power corrupts absolutely” – Sir John Acton
Warren Jeffs was grabbing a whole lot more than power. So, as I read you , all of these so-called leaders are actually frauds as they were never vetted, to see if they could do the job? Of course they were. That’s how tyrants gain power. The grab it…
From one TJ to another TJ….OSD beat me to the punch on this. So wrong on so many levels it’s mind boggling.
I boggled my mind once. It made me dizzy….
My mind got boggled once on steps A-E. I barfed.
Been there, done that, bought a T-shirt…with barf all over it.
Try a VO and ginger – it cures what ails ya
The problem with that is I’m alcoholic and the whole bottle of VO along with a six pack of beer would disappear!
What…like a magic act? I stick with a good bottle of Merlot.
Why not just rename Dianetics to “Dispersanetics”. It seems more appropriate based on its current function within the church’s* organizations. 🙂
*The term “church’s” is used figuratively.
cherch may be more accurate. 🙂
…or cult.
https://www.youtube.com/watch?v=RMR-yPA4lsY
“if you don’t learn quickly that sometimes you need to apply total control on others in order to save them…”
Frightening. How many false prophets, charismatic “messiahs” and totalitarian governments are built upon this very premise? All of them.
On a side note, check out the comments thread on The Register, a British IT site. Scroll down to the “I went to university down in Brighton…” thread and have a look. Their comments on Scientology’s dissemination are classic and very, very funny.
http://forums.theregister.co.uk/forum/1/2016/04/22/how_it_are_you_find_out_now_in_our_hilarious_quiz/
Scientology – the science of forcing people to hate others whilst promoting lies that they don’t.
Whoa! Now that was heavy! “…- the science of forcing people to hate other while promoting lies that they don’t. Wognited, you nailed it.
Wow. Powerfully true. You could even pare that down to simply:
The science of forcing people.
Whoa! Second time today I’ve been blown away! “The science of forcing people.” Scary.
wake up Orwell
…huh, …wh… YIKES!
W & O, you NAILED it! Post of the day, if not the week. One important way of immunizing people against the Cult is spotting what it does, then telling people ALL about it. Who then run away screaming…..
Just as a side note…while everyone talks about Disconnection policy and SPs, they push disconnection from people who are NOT SPs. The church worked overtime pressuring my spouse to divorce me over a year BEFORE they declared me.
How is that justified? I was not an SP. I had no outstanding Ethics Orders. They just decided the best thing (undoubtedly based on the Greatest Good), was that we divorce and break up the family.
statpush, you are not alone, there are so many people with similar stories. It’s a bad and harmful policy, applied arbitrarily.
Everything in the cult is about bad and harmful policies. Jonestown was just a shade worse…
Thank you RB for speaking truth!
Oh, my. This one, as usual, is totally spot on. Wouldn’t it be sweet if someone in the RPF were powerful enough and convincing enough to create huge upsurge of real freedom and have all of them just walk out of what they’re doing? Ah, Peter, dream on! LOL
“Spartacus RPF” starring Jason Beghe as the man who leads the revolt.
O, Yeah!
You need actors?
Screenplay writer (the real super-heroes)?
Sign me up.
I prefer the title “Revolt in the RPF.”
Hi MostEthicalPimp, Good post.How about a double feature ” Revolt in the RPF ” followed by that classic ” Revolting In The Stars “, another Ron pot-boiler of a space opera script. Laughter! xo Ann.